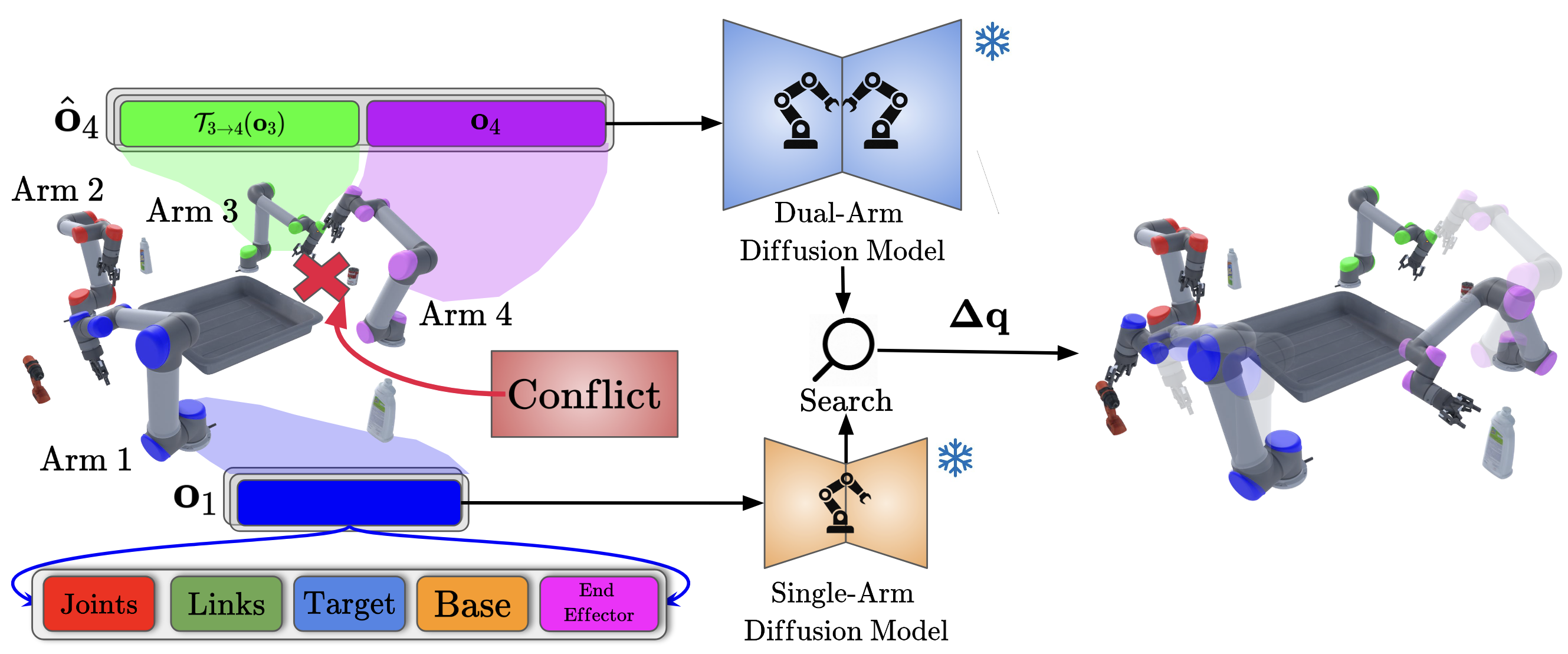
Multi-arm motion planning is fundamental for enabling arms to complete complex long-horizon tasks in shared spaces efficiently but current methods struggle with scalability due to exponential state-space growth and reliance on large training datasets for learned models. Inspired by Multi-Agent Path Finding (MAPF), which decomposes planning into single-agent problems coupled with collision resolution, we propose a novel diffusion-guided multi-arm planner (DG-MAP) that enhances scalability of learning-based models while reducing their reliance on massive multi-arm datasets. Recognizing that collisions are primarily pairwise, we train two conditional diffusion models, one to generate feasible single-arm trajectories, and a second, to model the dual-arm dynamics required for effective pairwise collision resolution. By integrating these specialized generative models within a MAPF-inspired structured decomposition, our planner efficiently scales to larger number of arms. Evaluations against alternative learning-based methods across various team sizes demonstrate our method's effectiveness and practical applicability.
Compressed GIFs to save memory.
@InProceedings{pmlr-v305-parimi25a,
title = {Diffusion-Guided Multi-Arm Motion Planning},
author = {Parimi, Viraj and Williams, Brian C.},
booktitle = {Proceedings of The 9th Conference on Robot Learning},
pages = {4684--4696},
year = {2025},
editor = {Lim, Joseph and Song, Shuran and Park, Hae-Won},
volume = {305},
series = {Proceedings of Machine Learning Research},
month = {27--30 Sep},
publisher = {PMLR},
pdf = {https://raw.githubusercontent.com/mlresearch/v305/main/assets/parimi25a/parimi25a.pdf},
url = {https://proceedings.mlr.press/v305/parimi25a.html},
}